

Distributed Formation Maneuver Control of Networked Euler-Lagrange Systems
-
摘要: 研究了网络化Euler-Lagrange系统自适应编队机动控制问题.针对参数不确定的Euler-Lagrange系统, 利用滑模控制方法提出了一种自适应编队机动控制算法.基于Lyapunov稳定性理论, 证明了闭环系统的稳定性.该算法的显著特点是通过引入一种特殊的有向网络拓扑来描述智能体之间的通信交互行为, 使得系统中跟随者在不需要知道或估计时变机动参数的情况下, 能够实现编队的方向、平移、形状的连续改变.最后对提出的自适应编队机动控制算法进行数值模拟以验证该控制方案的有效性.
-
关键词:
- 编队机动控制 /
- 分布式控制 /
- 网络化Euler-Lagrange系统 /
- 滑模控制
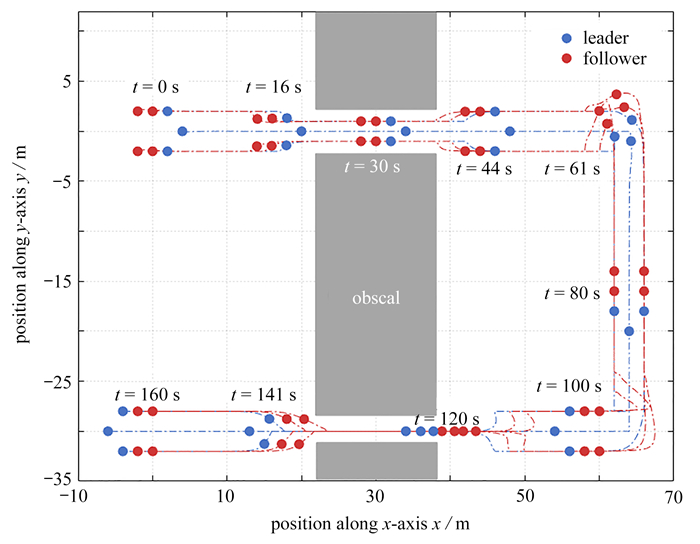
Abstract: The adaptive formation maneuver control of networked Euler-Lagrange systems was studied. By means of the sliding mode control approach, an adaptive formation maneuver control algorithm was proposed. Based on the Lyapunov stability theory, the stability of the closed-loop system was proved. The remarkable feature of the algorithm is the special directed network topology introduced to describe the communication interaction behavior between agents. Hence, without the need for knowing or estimating the time-varying maneuver parameters only known to the leaders, the followers in the system can realize the changes of formation continuously, including the scale, the direction, the displacement and the shape. Numerical simulation results verify the effectiveness of the proposed control scheme. -

图 4 系统的追踪位置误差
注 为了解释图中的颜色,读者可以参考本文的电子网页版本,后同.
Figure 4. Tracking position errors of the system
-
[1] GAN Y, DAI X. Kinematic cooperation analysis and trajectory teaching in multiple robots system for welding[C]//ETFA 2011. Toulouse, France: IEEE, 2011: 1-8. [2] SHITAL S, CHIDDARWAR, BABU N R. Dynamic priority allocation for conflict free coordinated manipulation of multiple agents[C]//2009 IEEE International Conference on Automation Science and Engineering. Bangalore, India: IEEE, 2008: 549-554. [3] LIU Z, GUAN Z, SHEN X, et al. Consensus of multi-agent networks with aperiodic sampled communication via impulsive algorithms using position-only measurements[J]. IEEE Transactions on Automatic Control, 2012, 57(10): 2639-2643. doi: 10.1109/TAC.2012.2214451 [4] LIU Z, YU X, GUAN Z, et al. Pulse-modulated intermittent control in consensus of multiagent systems[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017, 47(5): 783-793. doi: 10.1109/TSMC.2016.2524063 [5] 马丽新, 刘晨, 刘磊. 基于actor-critic算法的分数阶多自主体系统最优主-从一致性控制[J]. 应用数学和力学, 2022, 43(1): 104-114. doi: 10.21656/1000-0887.420124MA Lixin, LIU Chen, LIU Lei. Optimal leader-following consensus control of fractional-order multi-agent systems based on the actor-critic algorithm[J]. Applied Mathematics and Mechanics, 2022, 43(1): 104-114. (in Chinese) doi: 10.21656/1000-0887.420124 [6] 郑丽颖, 杨永清, 许先云. 基于时变拓扑结构的二阶多智能体系统采样一致性[J]. 应用数学和力学, 2022, 43(7): 783-791. doi: 10.21656/1000-0887.420220ZHENG Liying, YANG Yongqing, XU Xianyun. Sampling consensus of second-order multi-agent systems based on time-varying topology[J]. Applied Mathematics and Mechanics, 2022, 43(7): 783-791. (in Chinese) doi: 10.21656/1000-0887.420220 [7] 赵玮, 任凤丽. 基于牵制控制的多智能体系统的有限时间与固定时间一致性[J]. 应用数学和力学, 2021, 42(3): 299-307. doi: 10.21656/1000-0887.410190ZHAO Wei, REN Fengli. Finite-time and fixed-time consensus for multi-agent systems via pinning control[J]. Applied Mathematics and Mechanics, 2021, 42(3): 299-307. (in Chinese) doi: 10.21656/1000-0887.410190 [8] WANG H L. Consensus of networked mechanical systems with communication delays: a unified framework[J]. IEEE Transactions on Automatic Control, 2014, 59(6): 1571-1576. doi: 10.1109/TAC.2013.2293413 [9] WANG Q, CHEN J, XIN B, et al. Distributed optimal consensus for Euler-Lagrange systems based on event-triggered control[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(7): 4588-4598. doi: 10.1109/TSMC.2019.2944857 [10] WANG S, HUANG J. Adaptive leader-following consensus for multiple Euler-Lagrange systems with an uncertain leader system[J]. IEEE Transactions on Neural Networks and Learning Systems, 2019, 30(7): 2188-2196. doi: 10.1109/TNNLS.2018.2878463 [11] WANG Y, YU S, XIANG X, et al. Sampled-data consensus for networked Euler-Lagrange systems with differentiable scaling functions[J]. IEEE Access, 2021, 9: 139271-139279. doi: 10.1109/ACCESS.2021.3106663 [12] YAN H, SUN C, HUG. Robust tracking control of an Euler-Lagrange system subject to uncertain friction and impact[C]//2015 IEEE International Conference on Information and Automation. Lijiang, China: IEEE, 2015. [13] WEI Q L, WANG X, ZHONG X, et al. Consensus control of leader-following multi-agent systems in directed topology with heterogeneous disturbances[J]. IEEE/CAA Journal of Automatica Sinica, 2021, 8(2): 423-431. doi: 10.1109/JAS.2021.1003838 [14] DENG C, CHE W W. Fault-tolerant fuzzy formation control for a class of nonlinear multiagent systems under directed and switching topology[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(9): 5456-5465. doi: 10.1109/TSMC.2019.2954870 [15] DONG X, LI Q, ZHAO Q, et al. Time-varying group formation control for general linear multi-agent systems with directed topologies[C]//2016 35th Chinese Control Conference (CCC). Chengdu, China: IEEE, 2016. [16] ZHANG W, ZHAO Y, HE W, et al. Time-varying formation tracking for multiple dynamic targets: finite- and fixed-time convergence[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2021, 68(4): 1323-1327. doi: 10.1109/TCSII.2020.3025199 [17] ZHAO J, YU X, LI X, et al. Bearing-only formation tracking control of multi-agent systems with local reference frames and constant-velocity leaders[J]. IEEE Control Systems Letters, 2021, 5(1): 1-6. doi: 10.1109/LCSYS.2020.2999972 [18] ZHAO S, ZELAZO D. Translational and scaling formation maneuver control via a bearing-based approach[J]. IEEE Transactions on Control of Network Systems, 2017, 4(3): 429-438. doi: 10.1109/TCNS.2015.2507547 [19] ONUOHA O, TNUNAY H, DING Z. Affine formation maneuver control of multi-agent systems with triple-integrator dynamics[C]//2019 American Control Conference (ACC). Philadelphia, PA, USA: IEEE, 2019. [20] HAN T, LIN Z, ZHENG R, et al. A barycentric coordinate-based approach to formation control under directed and switching sensing graphs[J]. IEEE Transactions on Cybernetics, 2018, 48(4): 1202-1215. doi: 10.1109/TCYB.2017.2684461 [21] HAN T, LIN Z, XU W, et al. Three-dimensional formation merging control of second-order agents under directed and switching topologies[C]//11th IEEE International Conference on Control & Automation (ICCA). Taichung: IEEE, 2014. [22] ZHAO S. Affine formation maneuver control of multiagent systems[J]. IEEE Transactions on Automatic Control, 2018, 63(12): 4140-4155. doi: 10.1109/TAC.2018.2798805 [23] LI D, MA G, XU Y, et al. Layered affine formation control of networked uncertain systems: a fully distributed approach over directed graphs[J]. IEEE Transactions on Cybernetics, 2021, 51(12): 6119-6130. doi: 10.1109/TCYB.2020.2965657 [24] CHEN L, MEI J, LI C, et al. Distributed leader-follower affine formation maneuver control for high-order multiagent systems[J]. IEEE Transactions on Automatic Control, 2020, 65(11): 4941-4948. doi: 10.1109/TAC.2020.2986684 [25] ZHI H, CHEN L, LI C, et al. Leader-follower affine formation control of second-order nonlinear uncertain multi-agent systems[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2021, 68(12): 3547-3551. doi: 10.1109/TCSII.2021.3072652 [26] XU Y, ZHAO S, LUO D, et al. Affine formation maneuver control of linear multi-agent systems with undirected interaction graphs[C]//2018 IEEE Conference on Decision and Control (CDC). Miami, FL, USA: IEEE, 2018: 502-507. [27] XU Y, ZHAO S, LUO D, et al. Affine formation maneuver control of high-order multi-agent systems over directed networks[J]. Automatica, 2020, 118: 109004. doi: 10.1016/j.automatica.2020.109004 [28] XU Y, LUO D, YOU Y, et al. Affine transformation based formation maneuvering for discrete-time directed networked systems[J]. Science China Technological Sciences, 2020, 63: 73-85. doi: 10.1007/s11431-018-9456-0 [29] LIN Y, LIN Z, SUN Z, et al. A unified approach for finite-time global stabilization of affine, rigid, and translational formation[J]. IEEE Transactions on Automatic Control, 2022, 67(4): 1869-1881. doi: 10.1109/TAC.2021.3084247 [30] HAN Z, WANG L, LIN Z, et al. Formation control with size scaling via a complex Laplacian-based approach[J]. IEEE Transactions on Cybernetics, 2016, 46(10): 2348-2359. doi: 10.1109/TCYB.2015.2477107 [31] LIN Z, WANG L, HAN Z, et al. Distributed formation control of multi-agent systems using complex Laplacian[J]. IEEE Transactions on Automatic Control, 2014, 59(7): 1765-1777. doi: 10.1109/TAC.2014.2309031 [32] FANG X, LI X, XIE L. Distributed formation maneuver control of multiagent systems over directed graphs[J]. IEEE Transactions on Cybernetics, 2021, 52(8): 8201-8212. [33] CHEN G, LEWIS F L. Distributed adaptive tracking control for synchronization of unknown networked Lagrangian systems[J]. IEEE Transactions on Systems, Man, and Cybernetics(Part B): Cybernetics, 2011, 41(3): 805-816. doi: 10.1109/TSMCB.2010.2095497 [34] MENG Z, LIN Z, REN W. Leader-follower swarm tracking for networked Lagrange systems[J]. Systems & Control Letters, 2012, 61(1): 117-126. [35] JIE M, REN W, MA G. Distributed containment control for Lagrangian networks with parametric uncertainties under a directed graph[J]. Automatica, 2012, 48(4): 653-659. doi: 10.1016/j.automatica.2012.01.020 [36] KLOTZ J R, OBUZ S, KAN Z, et al. Synchronization of uncertain Euler-Lagrange systems with uncertain time-varying communication delays[J]. IEEE Transactions on Cybernetics, 2018, 48(2): 807-817. [37] KELLY R, DAVILA V S, PEREZ J. Control of Robot Manipulators in Joint Space[M]. London: Springer, 2005. -

 下载:
下载:


图(7)
计量
- 文章访问数: 585
- HTML全文浏览量: 246
- PDF下载量: 78
- 被引次数: 0

 渝公网安备50010802005915号
渝公网安备50010802005915号