

Preset-Time Consensus of Heterogeneous Fractional-Order Nonlinear Multi-Agent Systems
-
摘要: 该文研究了一类异质分数阶非线性多智能体系统的预设时间一致性问题. 设计了一类基于时变函数的预设时间分数阶积分控制器, 将分数阶非线性多智能体系统转化为一阶非线性多智能体系统. 然后综合利用整数阶Lyapunov函数法和预设时间控制技术, 分别实现了具有连通无向图和具有含生成树有向图的多智能体系统的精确预设时间一致性控制. 该预设时间可以通过时变函数预先设定, 且不依赖于系统初始值和参数. 最后, 用实例验证了理论结果的有效性.Abstract: The preset-time consensus problem of a class of heterogeneous fractional-order nonlinear multi-agent systems was studied. A type of time-varying function-based preset-time fractional integral controllers were designed, to convert the fractional-order nonlinear multi-agent system into a 1st-order nonlinear multi-agent system. Then, by means of the integer-order Lyapunov function method combined with the preset-time control technology, the accurate bipartite consensus control of multi-agent systems with the connected undirected graph and the directed graph containing spanning trees was realized, respectively. The preset time can be preset with the time-varying function, independent of system initial values and parameters. An example verifies the effectiveness of the theoretical results.
-

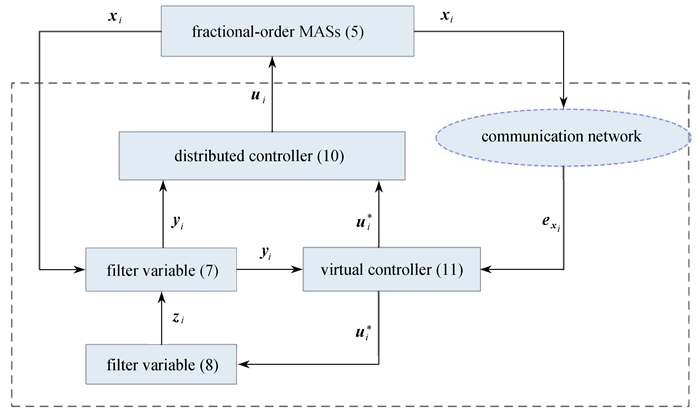
图 1 闭环分数阶多智能体系统的框架
Figure 1. The flowchart for closed-loop fractional-order multi-agent systems

图 2 含生成树有向图$\mathcal{G}$
Figure 2. Directed graph $\mathcal{G}$ containing the spanning tree

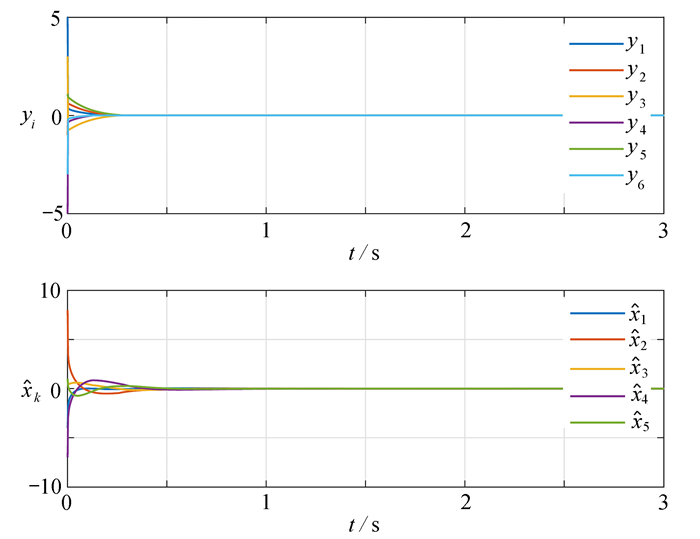
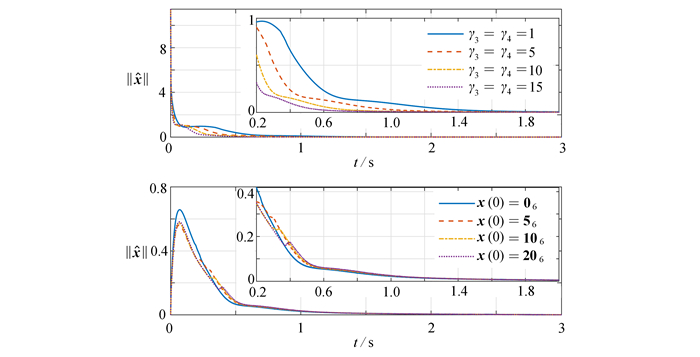
图 3 当α=0.8时,滤波变量$y_i$和一致性误差$\hat{x}_k$的轨迹
注 为了解释图中的颜色,读者可以参考本文的电子网页版本,后同.
Figure 3. Trajectories of filter variable $y_i$ and consensus error $\hat{x}_k$ for α=0.8

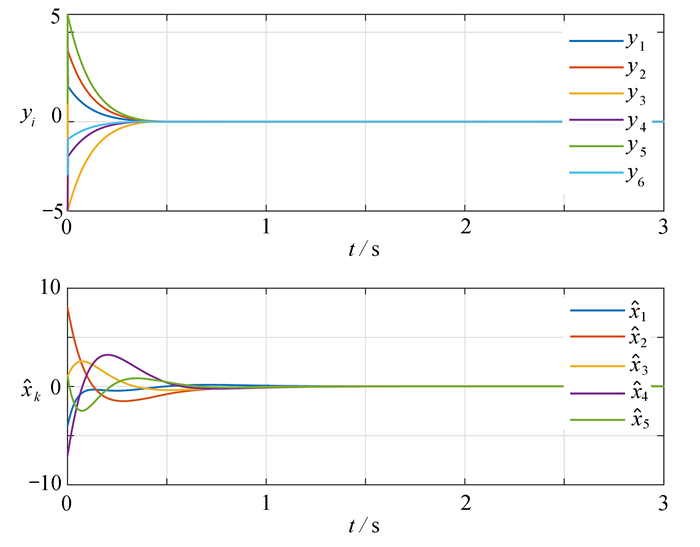
图 4 当α=1时,滤波变量$y_i$和一致性误差$\hat{x}_k$的轨迹
Figure 4. Trajectories of filter variable $y_i$ and consensus error $\hat{x}_k$ for α=1

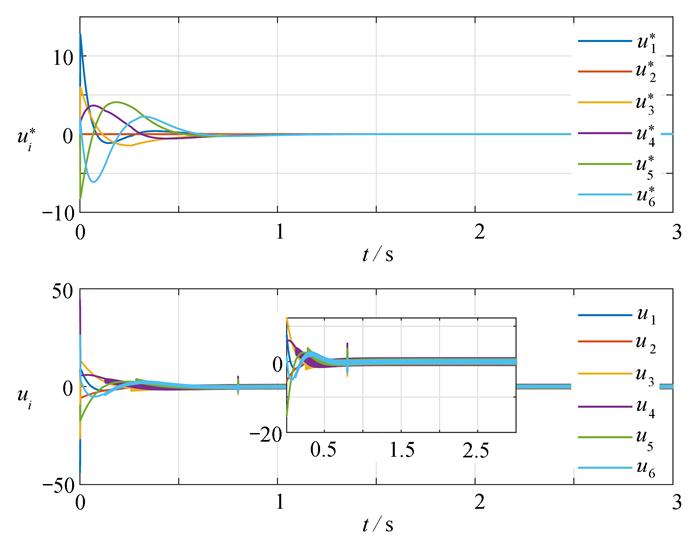
图 5 当α=0.8时,控制器$u_i^*$和$u_i$的轨迹
Figure 5. Trajectories of controllers $u_i^*$ and $u_i$ for α=0.8

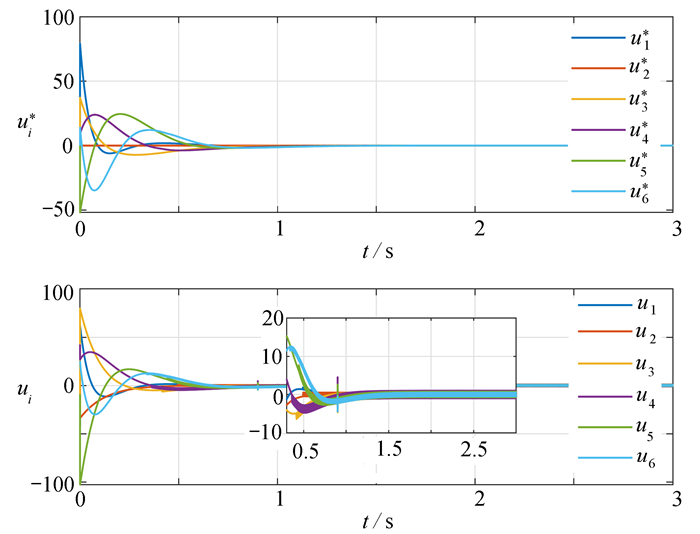
图 6 当α=1时,控制器$u_i^*$和$u_i$的轨迹
Figure 6. Trajectories of controllers $u_i^*$ and $u_i$ for α=1
-
[1] DU H, WEN G, CHENG Y, et al. Distributed finite-time cooperative control of multiple high-order nonholonomic mobile robots[J]. IEEE Transactions on Neural Networks and Learning Systems, 2017, 28(12): 2998-3006. doi: 10.1109/TNNLS.2016.2610140 [2] DONG X, YU B, SHI Z, et al. Time-varying formation control for unmanned aerial vehicles: theories and applications[J]. IEEE Transactions Control System Technology, 2015, 23(1): 340-348. doi: 10.1109/TCST.2014.2314460 [3] LESSER V, ORTIZ C L, TAMBE M. Distributed Sensor Networks: a Multiagent Perspective[M]. New York: Springer, 2003. [4] CHEN B, CHENG H. A review of the applications of agent technology in traffic and transportation systems[J]. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(2): 485-497. doi: 10.1109/TITS.2010.2048313 [5] GHARIB A, EJAZ W, IBNKAHLA M. Distributed spectrum sensing for IoT networks: architecture, challenges, and learning[J]. IEEE Internet of Things Magazine, 2021, 4(2): 66-73. doi: 10.1109/IOTM.0011.2000049 [6] OLFATI-SABER R, M-MURRAY R. Consensus problems in networks of agents with switching topology and time-delays[J]. IEEE Transactions on Automatic Control, 2004, 49(9): 1520-1533. doi: 10.1109/TAC.2004.834113 [7] 郑丽颖, 杨永清, 许先云. 基于时变拓扑结构的二阶多智能体系统采样一致性[J]. 应用数学和力学, 2022, 43(7): 783-791. doi: 10.21656/1000-0887.420220ZHENG Liying, YANG Yongqing, XU Xianyun. Sampling consensus of 2nd-order multi-agent systems based on time-varying topology[J]. Applied Mathematics and Mechanics, 2022, 43(7): 783-791. (in Chinese) doi: 10.21656/1000-0887.420220 [8] QIN J, MA Q, SHI Y, et al. Recent advances in consensus of multi-agent systems: a brief survey[J]. IEEE Transactions on Industrial Electronics, 2016, 64(6): 4972-4983. http://www.researchgate.net/profile/Jiahu_Qin/publication/311505964_Recent_Advances_in_Consensus_of_Multi-Agent_Systems_A_Brief_Survey/links/5849797c08ae5038263d84cf/Recent-Advances-in-Consensus-of-Multi-Agent-Systems-A-Brief-Survey.pdf [9] ZUO Z, HAN Q L, NING B, et al. An overview of recent advances in fixed-time cooperative control of multiagent systems[J]. IEEE Transactions on Industrial Informatics, 2018, 14(6): 2322-2334. doi: 10.1109/TII.2018.2817248 [10] KILBAS A A, SRIVASTAVA H M, TRUJILLO J J. Theory and Applications of Fractional Differential Equations[M]. Amsterdam: Elsevier Science, 2006. [11] Podlubny I. Fractional Differential Equations, Mathematics in Science and Engineering[M]. San Diego: Academic Press, 1999. [12] CAO Y C, LI Y, REN W, et al. Distributed coordination of networked fractional-order systems[J]. IEEE Transactions on Systems, Man, and Cybernetics(Part B): Cybernetics, 2009, 40(2): 362-370. http://www.researchgate.net/profile/YangQuan_Chen/publication/224560386_Distributed_Coordination_of_Networked_Fractional-Order_Systems/links/09e4150aa797b58580000000 [13] GONG P, HAN Q L. Practical fixed-time bipartite consensus of nonlinear incommensurate fractional-order multiagent systems in directed signed networks[J]. SIAM Journal on Control and Optimization, 2020, 58(6): 3322-3341. doi: 10.1137/19M1282970 [14] ZHU W, LI W, ZHOU P, et al. Consensus of fractional-order multi-agent systems with linear models via observer-type protocol[J]. Neurocomputing, 2017, 230: 60-65. doi: 10.1016/j.neucom.2016.11.052 [15] CHEN J, CHEN B, ZENG Z. Synchronization and consensus in networks of linear fractional-order multi-agent systems via sampled-data control[J]. IEEE Transactions on Neural Networks and Learning Systems, 2019, 31(8): 2955-2964. http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=8826011 [16] LIU H, CHENG L, TAN M, et al. Exponential finite-time consensus of fractional-order multiagent systems[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2020, 50(4): 1549-1558. doi: 10.1109/TSMC.2018.2816060 [17] SU H, YE Y, CHEN X, et al. Necessary and sufficient conditions for consensus in fractional-order multiagent systems via sampled data over directed graph[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(4): 2501-2511. doi: 10.1109/TSMC.2019.2915653 [18] HU W, WEN G, RAHMANI A, et al. Differential evolution-based parameter estimation and synchronization of heterogeneous uncertain nonlinear delayed fractional-order multi-agent systems with unknown leader[J]. Nonlinear Dynamics, 2019, 97(2): 1087-1105. doi: 10.1007/s11071-019-05034-1 [19] GONG P. Distributed tracking of heterogeneous nonlinear fractional-order multi-agent systems with an unknown leader[J]. Journal of the Franklin Institute, 2017, 354(5): 2226-2244. doi: 10.1016/j.jfranklin.2017.01.001 [20] GONG P, LAN W. Adaptive robust tracking control for uncertain nonlinear fractional-order multi-agent systems with directed topologies[J]. Automatica, 2018, 92: 92-99. doi: 10.1016/j.automatica.2018.02.010 [21] GONG P, HAN Q L, LAN W. Finite-time consensus tracking for incommensurate fractional-order nonlinear multiagent systems with directed switching topologies[J]. IEEE Transactions on Cybernetics, 2022, 52(1): 65-76. doi: 10.1109/TCYB.2020.2977169 [22] 马丽新, 刘晨, 刘磊. 基于actor-critic算法的分数阶多自主体系统最优主-从一致性控制[J]. 应用数学和力学, 2022, 43(1): 104-114. doi: 10.21656/1000-0887.420124MA Lixin, LIU Chen, LIU Lei. Optimal leader-following consensus control of fractional-order multi-agent systems based on the actor-critic algorithm[J]. Applied Mathematics and Mechanics, 2022, 43(1): 104-114. (in Chinese) doi: 10.21656/1000-0887.420124 [23] POLYAKOV A. Nonlinear feedback design for fixed-time stabilization of linear control systems[J]. IEEE Transactions on Automatic Control, 2012, 57(8): 2106-2110. doi: 10.1109/TAC.2011.2179869 [24] SHI X, LU J, LIU Y, et al. A new class of fixed-time bipartite consensus protocols for multi-agent systems with antagonistic interactions[J]. Journal of Franklin Institute, 2018, 355(12): 5256-5271. doi: 10.1016/j.jfranklin.2018.05.006 [25] ZOU W, QIAN K, XIANG Z. Fixed-time consensus for a class of heterogeneous nonlinear multiagent systems[J]. IEEE Transactions on Circuits and Systems: Express Briefs, 2020, 67(7): 1279-1283. doi: 10.1109/TCSII.2019.2930648 [26] WANG H, YU W, WEN G, et al. Fixed-time consensus of nonlinear multi-agent systems with general directed topologies[J]. IEEE Transactions on Circuits and Systems : Express Briefs, 2019, 66(9): 1587-1591. doi: 10.1109/TCSII.2018.2886298 [27] FU J, WANG J. Fixed-time coordinated tracking for second-order multi-agent systems with bounded input uncertainties[J]. Systems and Control Letters, 2016, 93: 1-12. doi: 10.1016/j.sysconle.2016.03.006 [28] ZUO Z, TIAN B, DEFOORT M, et al. Fixed-time consensus tracking for multiagent systems with high-order integrator dynamics[J]. IEEE Transactions on Automatics Control, 2018, 63(2): 563-570. doi: 10.1109/TAC.2017.2729502 [29] 赵玮, 任凤丽. 基于牵制控制的多智能体系统的有限时间与固定时间一致性[J]. 应用数学和力学, 2021, 42(3): 299-307. doi: 10.21656/1000-0887.410190ZHAO Wei, REN Fengli. Finite-time and fixed-time consensus for multi-agent systems via pinning control[J]. Applied Mathematics and Mechanics, 2021, 42(3): 299-307. (in Chinese) doi: 10.21656/1000-0887.410190 [30] GONG P, HAN Q L. Fixed-time bipartite consensus tracking of fractional-order multi-agent systems with a dynamic leader[J]. IEEE Transactions on Circuits and Systems : Express Briefs, 2020, 67(10): 2054-2058. doi: 10.1109/TCSII.2019.2947353 [31] BECERRA H M, VÁZQUEZ C R, ARECHAVALETA G, et al. Predefined-time convergence control for high-order integrator systems using time base generators[J]. IEEE Transactions on Control Systems Technology, 2018, 26(5): 1866-1873. doi: 10.1109/TCST.2017.2734050 [32] NING B, HAN Q L, ZUO Z. Bipartite consensus tracking for second-order multiagent systems: a time-varying function-based preset-time approach[J]. IEEE Transactions on Automatics Control, 2021, 66(6): 2739-2745. doi: 10.1109/TAC.2020.3008125 [33] WANG Y, SONG Y, HILL D J, et al. Prescribed-time consensus and containment control of networked multiagent systems[J]. IEEE Transactions on Cybernetics, 2019, 49(4): 1138-1147. doi: 10.1109/TCYB.2017.2788874 [34] ZHOU Y, LI C, JIANG G P, et al. Robust prescribed-time consensus of multi-agent systems with actuator saturation and actuator faults[J]. Asian Journal of Control, 2022, 24(2): 743-754. doi: 10.1002/asjc.2625 [35] LIU W, ZHOU S, QI Y, et al. Leaderless consensus of multiagent systems with Lipschitz nonlinear dynamics and switching topologies[J]. Neurocomputing, 2016, 173 : 1322-1329. http://www.onacademic.com/detail/journal_1000038285421810_abcf.html -

 下载:
下载:

计量
- 文章访问数: 523
- HTML全文浏览量: 217
- PDF下载量: 62
- 被引次数: 0

 渝公网安备50010802005915号
渝公网安备50010802005915号