

Dynamics Analysis of Large-Deformation Flexible Multibody Systems Based on the Adaptive Modal Selection Method
-
摘要: 柔性大变形系统在进行模态降阶时,若模态选取不当,会影响求解精度甚至导致求解结果发散.对此,提出了基于绝对节点坐标法(ANCF)的柔性大变形系统模态自适应选择方法.通过ANCF梁单元建立系统的动力学模型;利用全模态稀疏表示内部区域的坐标;根据Latin超立方抽样构建采样矩阵,作用于动力学方程,以减少方程的数量;以采样后的动力学方程作为约束,构造模态坐标范数优化问题;求解优化问题可以得到具有重大贡献的模态.通过两个实例表明:数值计算结果与常用方法的结果高度吻合并且求解效率显著提升.
-
关键词:
- 柔性多体动力学 /
- 自适应选择 /
- 动态响应 /
- 绝对节点坐标法(ANCF)
Abstract: During the modal truncation to reduce the model order of flexible multibody systems, the inappropriate modal selection would impair the precision of dynamic responses, or even cause divergent solutions. Thus, an efficient method of adaptive modal selection based on the absolute nodal coordinate formulation (ANCF) was proposed for large-deformation flexible multibody systems. The dynamic model for the system was established with the ANCF beam elements. The full modal sparse representation was used for the coordinates of the interior region. The sampling matrix was built through the Latin hypercube sampling to reduce the number of dynamic equations. The sparse modal coordinates' norm optimization problem was constructed with the sampling dynamic equations as constraints, to which the solution could give modes of significant contribution. Two examples show that, the numerical results are very close to the results of common methods and the computation efficiency markedly improves. -

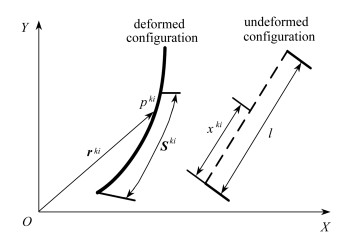
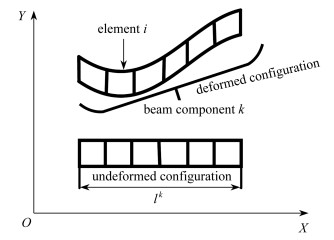
图 1 梁部件k的初始构型和当前构型
Figure 1. Undeformed and deformed configurations of beam component k

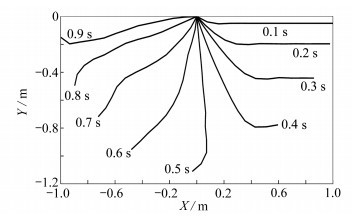
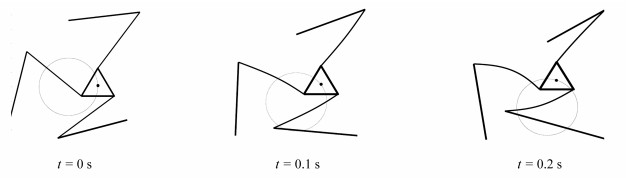
图 5 不同时刻柔性单摆构型
Figure 5. Configurations of the free falling pendulum at different moments

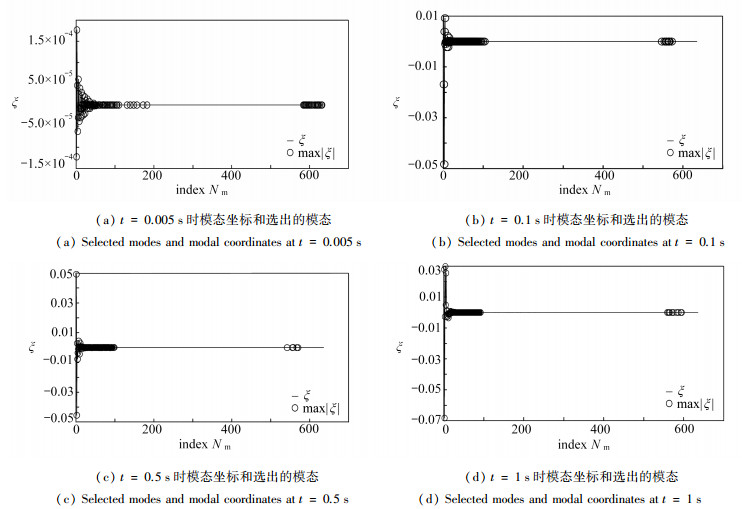
图 7 提出的方法在不同时间步长下对模态的自适应选择(单摆)
Figure 7. Adaptive selection of modal coordinates with the proposed method for different time steps(pendulum)

图 8 全局坐标系下的3-RRR并联机器人示意图
Figure 8. Geometry and global coordinates of the 3-RRR mechanism

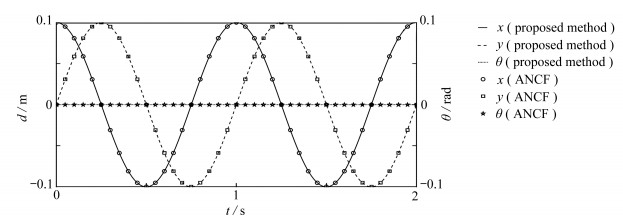
图 10 移动平台在x,y方向上的位移以及转角θ
Figure 10. Rotation angle θ and displacements in directions x and y of the platform

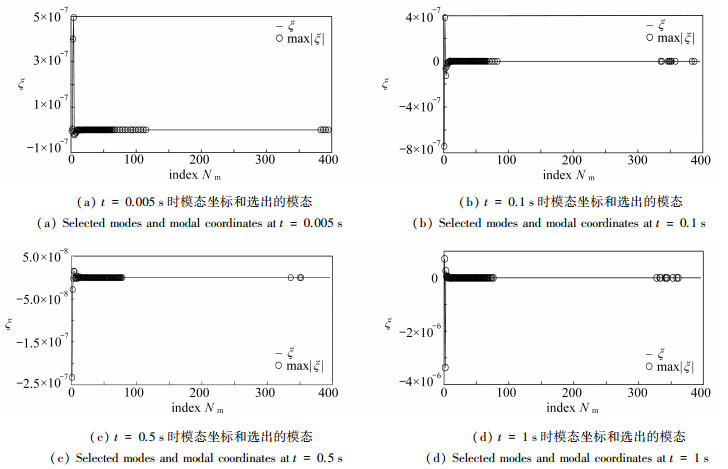
图 11 提出的方法在不同时间步长下对模态的自适应选择
Figure 11. Adaptive selection of modal coordinates with the proposed method for different time steps
表 1 单摆的几何与材料参数
Table 1. Geometry parameters and material parameters of the pendulum
parameter value length l/m 1 square sectional area A/m2 4×10-4 Young’s modulus E/Pa 7×105 density ρ/(kg/m3) 7.2×103 moment of inertia I/m4 1.333×10-8  下载: 导出CSV
下载: 导出CSV
表 2 单摆传统ANCF和所提出方法的计算效率(单位: s)
Table 2. Computation efficiency of the ANCF and the proposed method for pendulums (unit: s)
model matrix operation updated Jacobian matrix, stiffness matrix and residue etc total time ANCF 176.411 598.334 787.071 proposed 118.341 412.514 531.855
下载: 导出CSV
表 3 机构的几何与材料参数
Table 3. Geometry parameters and material parameters of the mechanism
material parameter driving link passive link member length l/m thickness T/m 0.01 0.005 driving link 0.245 width W/m 0.03 0.01 passive link 0.242 Young’s modulus E/Pa 2.01×1011 7×108 moving stage 0.112 density ρ/(kg/m3) 2.7×103 2.7×103 fixed stage 0.400
下载: 导出CSV
表 4 传统ANCF和所提出方法的计算效率(单位: s)
Table 4. Computation efficiency of the ANCF and the proposed method (unit: s)
model matrix operation updated Jacobian matrix, stiffness matrix and residue etc total time ANCF 566.283 6 766.148 1 390.966 proposed 184.131 223.639 421.281
下载: 导出CSV
-
[1] GUYAN R J. Reduction of stiffness and mass matrices[J]. AIAA Journal, 1965, 3(2): 380. doi: 10.2514/3.2874 [2] HURTY W C. Dynamic analysis of structural systems using component modes[J]. AIAA Journal, 1965, 3(4): 255-282. [3] WILLIAM F. Numerical Linear Algebra With Applications[M]. Academic Press, 2013. [4] KERSCHENG, GOLINVAL J C, VAKAKIS A, et al. The method of proper orthogonal decomposition for dynamical characterization and order reduction of mechanical systems: an overview[J]. Nonlinear Dynamics, 2005, 41(1): 147-169. [5] RAMA R R, SKATULLA S. Towards real-time modelling of passive and active behaviour of the human heart using PODI-based model reduction[J]. Computers and Structures, 2020, 232: 105897. doi: 10.1016/j.compstruc.2018.01.002 [6] CRAIG JR R R. Coupling of substructures for dynamic analyses: an overview[C]//41st Structures, Structural Dynamics, and Materials Conference and Exhibit. Atlanta, GA, 2000. [7] AARTS R G K M, JONKER J B. Dynamic simulation of planar flexible link manipulators using adaptive modal integration[J]. Multibody System Dynamics, 2002, 7(1): 31-50. doi: 10.1023/A:1015271000518 [8] BRÜLS O, DUYSINX P, GOLINVAL J C. The global modal parameterization for non-linear model-order reduction in flexible multibody dynamics[J]. International Journal for Numerical Methods in Engineering, 2007, 69(5): 948-977. doi: 10.1002/nme.1795 [9] TANG Y X, HU H Y, TIAN Q. Model order reduction based on successively local linearizations for flexible multibody dynamics[J]. International Journal for Numerical Methods in Engineering, 2019, 118(3): 159-180. doi: 10.1002/nme.6011 [10] BRACCESI C, CIANETTI F. Development of selection methodologies and procedures of the modal set for the generation of flexible body models for multi-body simulation[J]. Proceedings of the Institution of Mechanical Engineers (Part K): Journal of Multi-Body Dynamics, 2004, 218(1): 19-30. [11] LIANG G, HUANG Y, LI H, et al. Nonlinear compressed sensing-based adaptive modal shapes selection approach for efficient dynamic response analysis of flexible multibody system[J]. Nonlinear Dynamics, 2021, 105(4): 3393-3407. doi: 10.1007/s11071-021-06747-y [12] SHABANA A A, SCHWERTASSEK R. Equivalence of the floating frame of reference approach and finite element formulations[J]. International Journal of Non-Linear Mechanics, 1998, 33(3): 417-432. doi: 10.1016/S0020-7462(97)00024-3 [13] KANE T R. Dynamics of a cantilever beam attached to a moving base[J]. Journal of Guidance, Control, and Dynamics, 1987, 10(2): 139-139. doi: 10.2514/3.20195 [14] SHABANA A A. An absolute nodal coordinate formulation for the large rotation and deformation analysis of flexible bodies: MBS96-1-UIC[R]. Chicago: University of Illinois at Chicago, 1996. [15] KOBAYASHI N, WAGO T, SUGAWARA Y. Reduction of system matrices of planar beam in ANCF by component mode synthesis method[J]. Multibody System Dynamics, 2011, 26(3): 265-281. doi: 10.1007/s11044-011-9259-6 [16] BERZERI M, SHABANA A A. Development of simple models for the elastic forces in the absolute nodal co-ordinate formulation[J]. Journal of Sound and Vibration, 2000, 235(4): 539-565. doi: 10.1006/jsvi.1999.2935 [17] GULLIKSSON M, OLEYNIK A. Greedy Gauss-Newton algorithms for finding sparse solutions to nonlinear underdetermined systems of equations[J]. Optimization, 2017, 66(7): 1201-1217. doi: 10.1080/02331934.2017.1307982 [18] 王启生, 蒋建平, 李庆军, 等. 空间机器人组装超大型结构的动力学分析[J]. 应用数学和力学, 2022, 43(8): 835-845. doi: 10.21656/1000-0887.420244WANG Qisheng, JIANG Jianping, LI Qingjun, et al. Dynamic analyses of the assembling process of ultra-large structures witch space robots[J]. Applied Mathematics and Mechanics, 2022, 43(8): 835-845. (in Chinese) doi: 10.21656/1000-0887.420244 [19] 卓英鹏, 王刚, 齐朝晖, 等. 节点参数含应变的空间几何非线性样条梁单元[J]. 应用数学和力学, 2022, 43(9): 987-1003. doi: 10.21656/1000-0887.420290ZHUO Yingpeng, WANG Gang, QI Zhaohui, et al. A spatial geometric nonlinearity spline beam element with nodal parameters containing strains[J]. Applied Mathematics and Mechanics, 2022, 43(9): 987-1003. (in Chinese) doi: 10.21656/1000-0887.420290 -



计量
- 文章访问数: 458
- HTML全文浏览量: 138
- PDF下载量: 46
- 被引次数: 0

 渝公网安备50010802005915号
渝公网安备50010802005915号