

Application Study on the DDPG Method for Designing Variable Camber Airfoils/Wings Under Buffeting Constraints
-
摘要: 变弯度技术可以提升巡航多升力系数工况下的升阻性能,对于提高整段巡航的经济效益具有重要意义. 构造了光滑连续的流动分离函数约束翼型抖振性能,结合变弯度技术与人工神经网络代理模型搭建了某机翼截面翼型的巡航多升力系数工况优化模型. 应用深度确定性策略梯度(DDPG)方法优化此模型,实现了抖振约束下6.8%的巡航平均升阻比提升,优于粒子群和改进灰狼算法对此模型的优化结果. 以优化前后翼型分别生成锥形后掠翼,验证了二维翼型变弯度优化对三维机翼的贡献.Abstract: The application of the variable camber technology has promising results in improving the lift-to-drag performance during the cruise phase, particularly under multi-lift conditions. This improvement is crucial for enhancing the economic benefits of the entire flight. A smooth and continuous flow separation function was developed to constrain the buffeting performance. An optimization model for cruise performances under multi-lift conditions of wing cross sections was constructed through combination of this function with the variable camber technology and an artificial neural network surrogate model. The deep deterministic policy gradient (DDPG) method was used to optimize this model, resulting in a cruise average lift-to-drag ratio improvement of 6.8% under buffeting constraints. This improvement surpasses the results obtained by other optimization algorithms, such as the particle swarm optimization (PSO) and the improved gray wolf optimization (GWO). The results of the generation and analysis of 2 conical swept wings with the unoptimized and optimized airfoils, show the contribution of the 2D variable camber airfoil optimization to 3D wings.
-
Key words:
- aerodynamic optimization /
- DDPG /
- variable camber /
- buffet
edited-byedited-by1) (我刊编委孙刚来稿) -

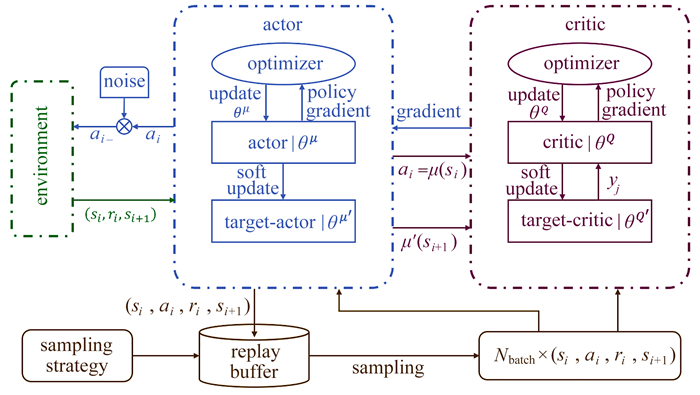
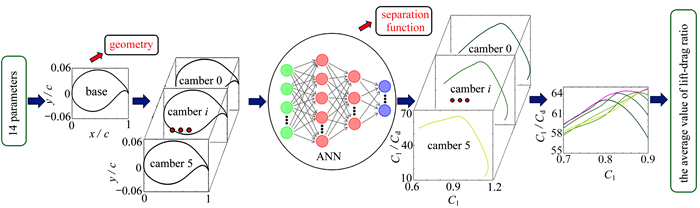
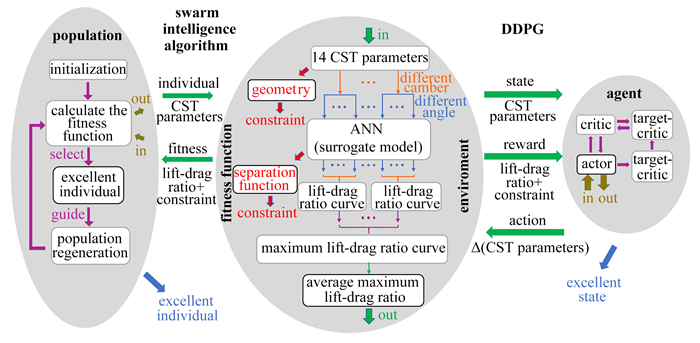
图 1 变弯度翼型优化设计框架
注 为了解释图中的颜色,读者可以参考本文的电子网页版本,后同.
Figure 1. The optimization design framework for variable curvature airfoils

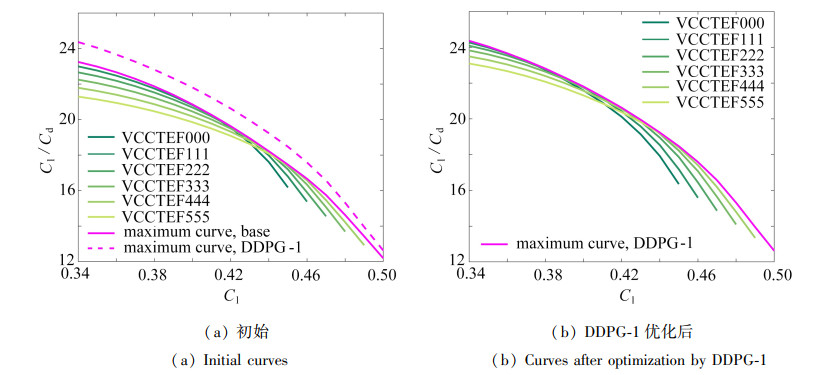
图 2 超临界翼型不同后缘偏转角度的升阻比曲线
Figure 2. Lift-drag ratio curves of supercritical airfoils under different trailing edge deflection angles

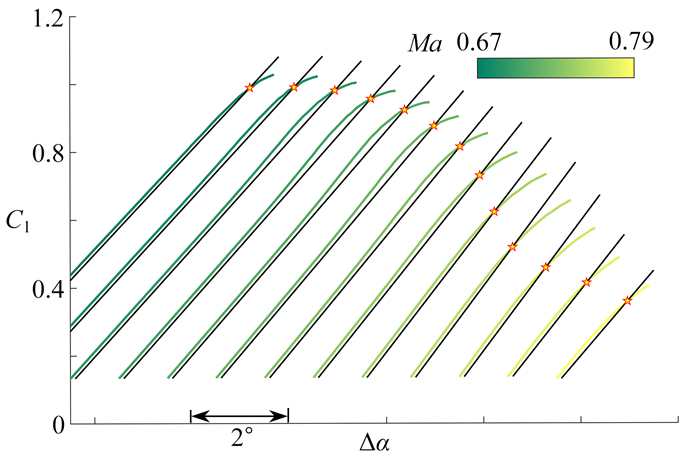
图 3 Δα=0.1方法在不同Mach数下的抖振边界判定
Figure 3. Buffet onset determination of the Δα=0.1 method for different Mach numbers

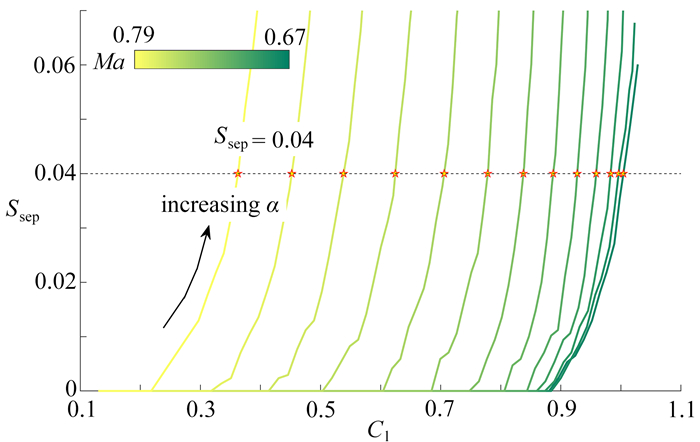
图 4 分离函数方法在不同Mach数下的抖振边界判定
Figure 4. Buffet onset determination of the separation function method for different Mach numbers

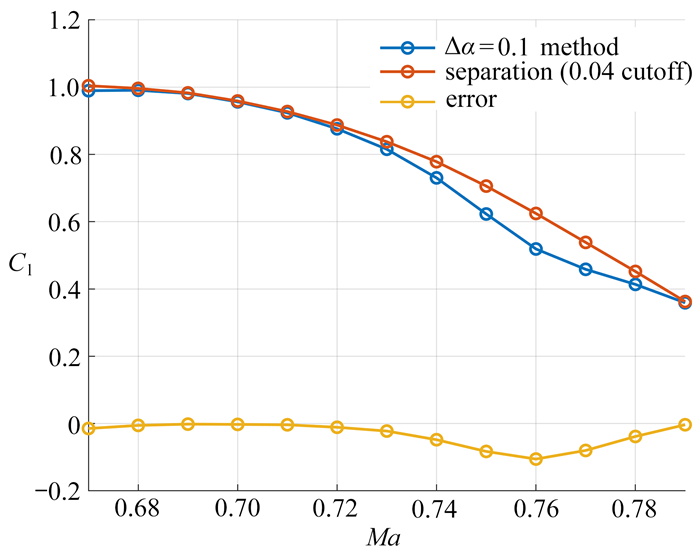
图 5 Δα=0.1方法和分离函数方法的对比
Figure 5. Comparison between the Δα=0.1method and the separation function method

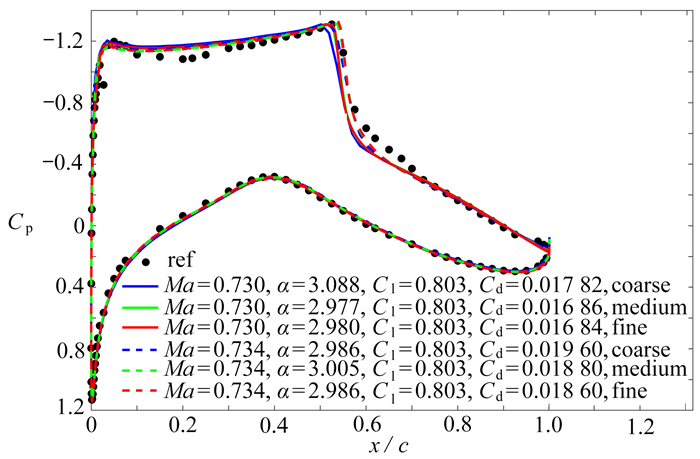
图 8 不同网格精度下机翼截面压力分布
Figure 8. Wing section pressure distributions with different grid finesses

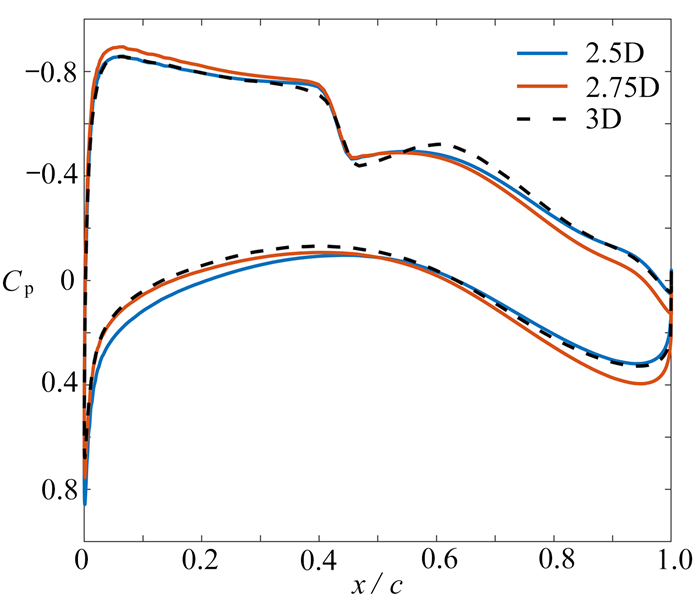
图 10 2.5D、2.75D和3D计算的压力分布对比
Figure 10. Comparison of pressure distributions for 2.5D, 2.75D and 3D calculations

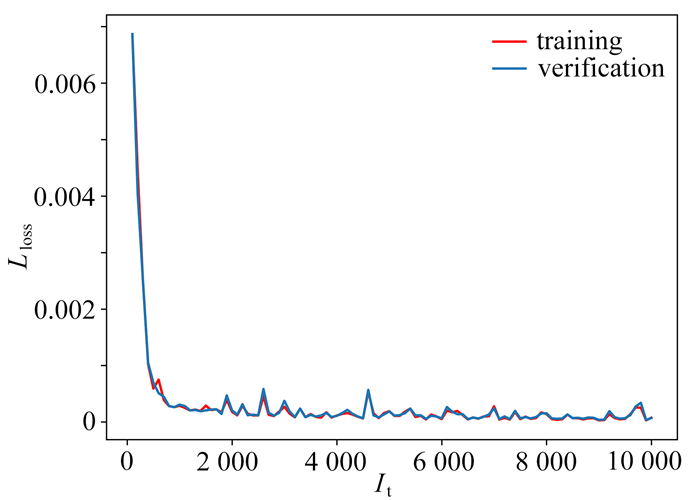
图 12 训练集和验证集的损失函数收敛曲线
Figure 12. Loss function convergence curves for the training set and the verification set

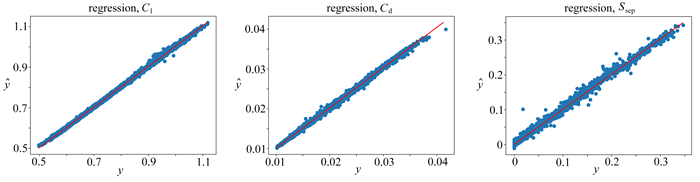
图 13 整体数据集预测的Cl, Cd, Ssep的线性回归图
Figure 13. Linear regression plots of Cl, Cd and Ssep predicted by the overall data set

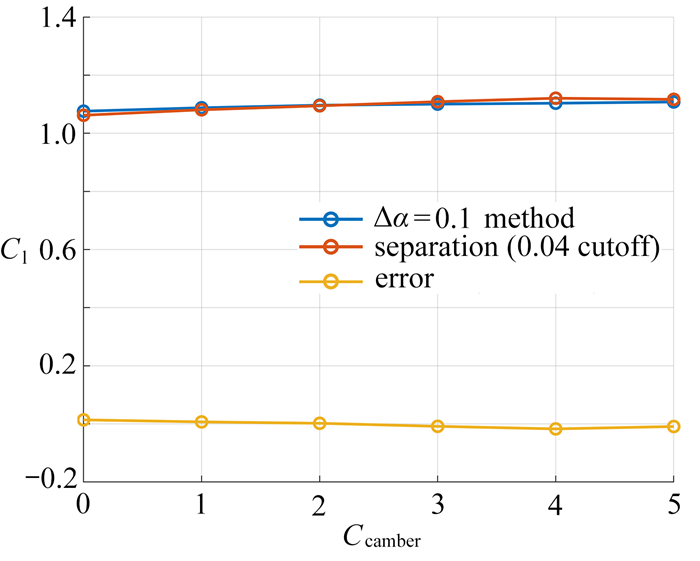
图 14 初始翼型不同弯度下的抖振边界
Figure 14. Buffet onsets of initial airfoil shapes with different cambers

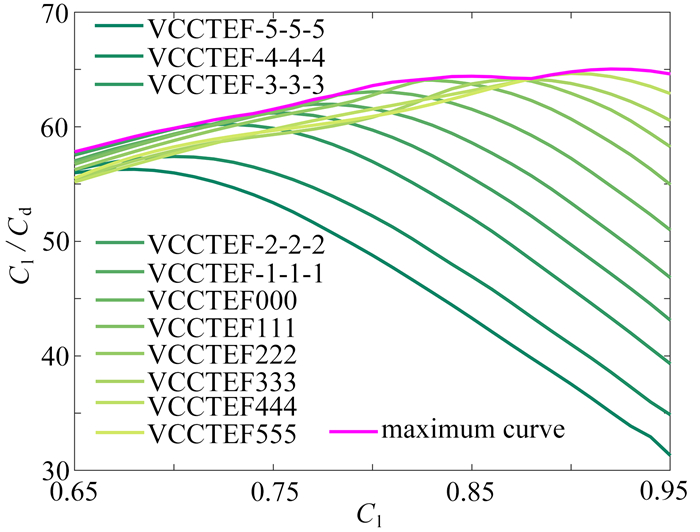
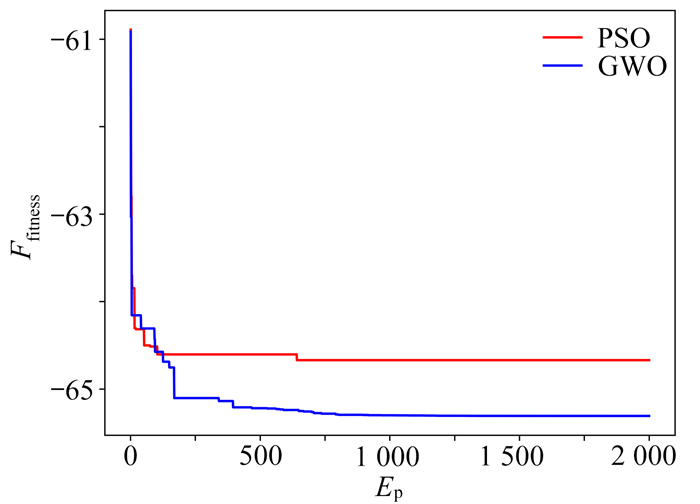
图 18 不同方法优化的升阻比最大曲线
Figure 18. Lift to drag ratio maximum curves optimized with different methods
表 1 CRM机翼网格收敛性验证
Table 1. Mesh convergence study for the CRM wing
mesh size α/(°) Ma Cl Cd coarse 1 089 048 2.47 0.85 0.500 0.022 1 medium 5 083 584 2.43 0.85 0.500 0.021 5 fine 21 028 625 2.42 0.85 0.500 0.021 4  下载: 导出CSV
下载: 导出CSV
表 2 2.5D方法工况转换结果
Table 2. Case conversion results of the 2.5D method
Ma Cl Re 3D 0.85 0.5 5×106 2D 0.737 0.798 5×106
下载: 导出CSV
表 3 优化结果比较
Table 3. Comparison of optimization results
base 0 base PSO GWO DDPG-5 DDPG-1 Cl/Cd - 62.37 64.67 65.00 65.12 65.04 t/s - - 861.48 824.86 235.24 48.33 Cl/Cd(CFD) 61.15 62.80 64.52 65.28 65.18 65.29 buffet onset 1.075 1.075 1.103 1.085 1.121 1.076
下载: 导出CSV
-
[1] 郝璇, 张青青, 苏诚, 等. 民用客机可变弯度机翼优化设计研究[J]. 航空工程进展, 2022, 13(4): 25-36.HAO Xuan, ZHANG Qingqing, SU Cheng, et al. Research on variable camber wing optimization design of passenger aircraft[J]. Advances in Aeronautical Science and Engineering, 2022, 13(4): 25-36. (in Chinese) [2] URNES J, NGUYEN N, IPPOLITO C, et al. A mission adaptive variable camber flap control system to optimize high lift and cruise lift to drag ratios of future N+3 transport aircraft[C]// 51st AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition. Grapevine, Texas, USA: AIAA, 2013. [3] KAUL U K, NGUYEN N T. Drag optimization study of variable camber continuous trailing edge flap (VCCTEF) using OVERFLOW[C]// 32nd AIAA Applied Aerodynamics Conference. Atlanta, GA, USA: AIAA Aviation, 2014. [4] NIU W, ZHANG Y, CHEN H, et al. Numerical study of a supercritical airfoil/wing with variable-camber technology[J]. Chinese Journal of Aeronautics, 2020, 33(7): 1850-1866. doi: 10.1016/j.cja.2020.01.008 [5] 郭同彪, 白俊强, 杨体浩. 后缘连续变弯度对跨声速翼型气动特性的影响[J]. 航空学报, 2016, 37(2): 513-521.GUO Tongbiao, BAI Junqiang, YANG Tihao. Influence of continuous trailing-edge variable camber on aerodynamic characteristics of transonic airfoils[J]. Chinese Journal of Aeronautics, 2016, 37(2): 513-521. (in Chinese) [6] LEE B. Self-sustained shock oscillations on airfoils at transonic speeds[J]. Progress in Aerospace Sciences, 2001, 37(2): 147-196. doi: 10.1016/S0376-0421(01)00003-3 [7] ZHAO Y, DAI Z, TIAN Y, et al. Flow characteristics around airfoils near transonic buffet onset conditions[J]. Chinese Journal of Aeronautics, 2020, 33(5): 1405-1420. doi: 10.1016/j.cja.2019.12.022 [8] KENWAY G K W, MARTINS J R R A. An separation-based constraint for high fidelity aerodynamic shape optimization[C]// 54th AIAA Aerospace Sciences Meeting. San Diego, CA, USA: AIAA SciTech, 2016. [9] 雷锐午, 白俊强, 许丹阳, 等. 考虑抖振特性的变弯度机翼设计研究[J]. 中国科学: 技术科学, 2020, 50(2): 161-174.LEI Ruiwu, BAI Junqiang, XU Danyang, et al. Research on variable camber wing of civil aircraft considering buffeting characteristics[J]. Science China: Technological, 2020, 50(2): 161-174. (in Chinese) [10] PETROCCHI A, BARAKOS G N. Buffet boundary prediction using RANS-based criteria and adjoint methods[J]. Aerospace Science and Technology, 2022, 126: 107664. doi: 10.1016/j.ast.2022.107664 [11] LAWSON S G, GREENWELL D, QUINN M K. Characterisation of buffet on a civil aircraft wing[C]// 54th AIAA Aerospace Sciences Meeting. San Diego, CA, USA: AIAA SciTech, 2016. [12] ZHOU S K, LE H N, LUU K, et al. Deep reinforcement learning in medical imaging: a literature review[J]. Medical Image Analysis, 2021, 73: 102193. doi: 10.1016/j.media.2021.102193 [13] 马岽奡, 唐娉, 赵理君, 等. 深度学习图像数据增广方法研究综述[J]. 中国图象图形学报, 2021, 26(3): 487-502.MA Dongao, TANG Ping, ZHAO Lijun, et al. Review of data augmentation for image in deep learning[J]. Journal of Image and Graphics, 2021, 26(3): 487-502. (in Chinese) [14] ELALLID B B, BENAMAR N, HAFID A S, et al. A comprehensive survey on the application of deep and reinforcement learning approaches in autonomous driving[J]. Journal of King Saud University: Computer and Information Sciences, 2022, 34(9): 7366-7390. doi: 10.1016/j.jksuci.2022.03.013 [15] 韩胜明, 肖芳, 程纬森. 深度强化学习在自动驾驶系统中的应用综述[J]. 西华大学学报(自然科学版), 2023, 42(4): 25-31.HAN Shengming, XIAO Fang, CHENG Weisen. Overview of applied on deep reinforcement learning in autonomous driving systems[J]. Journal of Xihua University(Natural Science Edition), 2023, 42(4): 25-31. (in Chinese) [16] VIQUERAT J, RABAULT J, KUHNLE A, et al. Direct shape optimization through deep reinforcement learning[J]. Journal of Computational Physics, 2021, 428: 110080. doi: 10.1016/j.jcp.2020.110080 [17] BHOLA S, PAWAR S, BALAPRAKASH P, et al. Multi-fidelity reinforcement learning framework for shape optimization[J]. Journal of Computational Physics, 2022, 482: 112018. [18] YAN X, ZHU J, KUANG M, et al. Aerodynamic shape optimization using a novel optimizer based on machine learning techniques[J]. Aerospace Science and Technology, 2019, 86: 826-835. doi: 10.1016/j.ast.2019.02.003 [19] QIN S, WANG S, WANG L, et al. Multi-objective optimization of cascade blade profile based on reinforcement learning[J]. Applied Sciences, 2020, 11(1): 106. doi: 10.3390/app11010106 [20] KAUL U K, NGUYEN N T. Drag characterization study of variable camber continuous trailing edge flap[J]. Journal of Fluids Engineering, 2018, 140(10): 101108. doi: 10.1115/1.4040070 [21] NGUYEN N, TRINH K, REYNOLDS K, et al. Elastically shaped wing optimization and aircraft concept for improved cruise efficiency[C]// 51st AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition. Grapevine, Texas, USA: AIAA, 2013. [22] TING E, CHAPARRO D, NGUYEN N, et al. Optimization of variable-camber continuous trailing-edge flap configuration for drag reduction[J]. Journal of Aircraft, 2018, 55(6): 2217-2239. doi: 10.2514/1.C034810 [23] LILLICRAP T P, HUNT J J, PRITZEL A, et al. Continuous control with deep reinforcement learning[R/OL]. (2019-07-05)[2023-09-27]. https://arxiv.org/abs/1509.02971 .[24] VASSBERG J C, TINOCO E N, MANI M, et al. Summary of the fourth AIAA computational fluid dynamics drag prediction workshop[J]. Journal of Aircraft, 2014, 51(4): 1070-1089. doi: 10.2514/1.C032418 [25] LEVY D W, LAFLIN K R, TINOCO E N, et al. Summary of data from the fifth computational fluid dynamics drag prediction workshop[J]. Journal of Aircraft, 2014, 51(4): 1194-1213. doi: 10.2514/1.C032389 [26] LYU Z, KENWAY G, MARTINS J. Aerodynamic shape optimization investigations of the common research model wing benchmark[J]. AIAA Journal, 2014, 53(4): 968-985. [27] LEE C, KOO D, ZINGG D W. Comparison of B-spline surface and free-form deformation geometry control for aerodynamic optimization[J]. AIAA Journal, 2016, 55(1): 1-13. [28] COOK P H, MCDONALD M A, FIRMIN M C P. Aerofoil RAE2822: pressure distributions, and boundary layer and wake measurements[C]//Experimental Data Base for Computer Program Assessment. AGARD Advisory Report. 1979: 138. [29] 白文. 经典跨声速翼型RAE2822数据分析[J]. 空气动力学学报, 2022, 41(16): 55-70.BAI Wen. Analyses of wind-tunnel test data of the transonic airfoil RAE2822[J]. Acta Aerodynamica Sinica, 2022, 41(16): 55-70. (in Chinese) [30] CELLA U, QUAGLIARELLA D, DONELLI R, et al. Design and test of the UW5006 transonic natural-laminar-flow wing[J]. Journal of Aircraft, 2010, 47(3): 783-795. doi: 10.2514/1.40932 [31] LI F W. Airfoil Design, in Aerodynamic Theory[M]. Northeast Poly-Technical University Press, 2007. [32] XU Z, HAN Z, SONG W. An improved 2.75D method relating pressure distributions of 2D airfoils and 3D wings[J]. Aerospace Science and Technology, 2022, 128: 107789. doi: 10.1016/j.ast.2022.107789 [33] ZHAO T, ZHANG Y, CHEN H, et al. Supercritical wing design based on airfoil optimization and 2.75D transformation[J]. Aerospace Science and Technology, 2016, 56: 168-182. doi: 10.1016/j.ast.2016.07.010 [34] STREIT T, WICHMANN G, HATZBACH F, et al. Implications of conical flow for laminar wing design and analysis[C]//AIAA Applied Aerodynamics Conference. San Diego, CA, USA: AIAA, 2011. [35] LIEM R P, KENWAY G K W, MARTINS J R R A. Multimission aircraft fuel-burn minimization via multipoint aerostructural optimization[J]. AIAA Journal, 2014, 53(1): 104-122. [36] 王沐晨, 李立州, 张珺, 等. 基于卷积神经网络气动力降阶模型的翼型优化方法[J]. 应用数学和力学, 2022, 43(1): 77-83. doi: 10.21656/1000-0887.420137WANG Muchen, LI Lizhou, ZHANG Jun, et al. An airfoil optimization method based on the convolutional neural network aerodynamic reduced order model[J]. Applied Mathematics and Mechanics, 2022, 43(1): 77-83. (in Chinese) doi: 10.21656/1000-0887.420137 [37] 张珺, 李立州, 原梅妮. 径向基函数参数化翼型的气动力降阶模型优化[J]. 应用数学和力学, 2019, 40(3): 250-258. doi: 10.21656/1000-0887.390187ZHANG Jun, LI Lizhou, YUAN Meini. Optimization of RBF parameterized airfoils with the aerodynamic ROM[J]. Applied Mathematics and Mechanics, 2019, 40(3): 250-258. (in Chinese) doi: 10.21656/1000-0887.390187 [38] KENNEDY J, EBERHART R. Particle swarm optimization[C]//Icnn 95-International Conference on Neural Networks. Perth, WA, Australia: IEEE, 1995. [39] 张贾奎, 崔利杰, 郭庆, 等. 基于Tent混沌序列的灰狼优化算法[J]. 微电子学与计算机, 2018, 35(6): 11-16.ZHANG Jiakui, CUI Lijie, GUO Qing, et al. Grey wolf optimizer based on Tent chaotic sequence[J]. Microelectronics and Computer, 2018, 35(6): 11-16. (in Chinese) -







计量
- 文章访问数: 695
- HTML全文浏览量: 326
- PDF下载量: 63
- 被引次数: 0

 渝公网安备50010802005915号
渝公网安备50010802005915号